Design an inverse kinematic controller to move end-effector
coursework for the 2nd semester of MAIA in Introduction to Robotics course
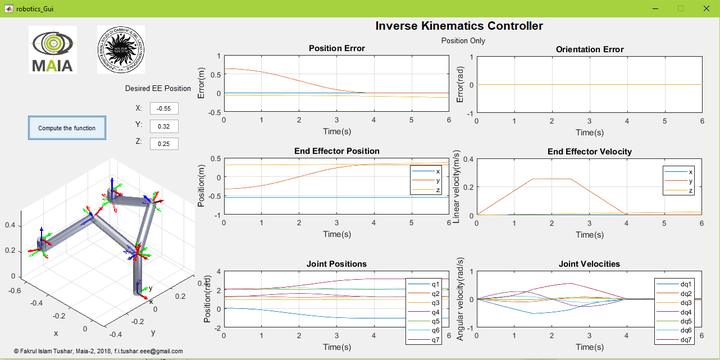 Inverse kinamatics Controller GUI
Inverse kinamatics Controller GUIAbstract
Design an inverse kinematic controller to move end-effector. This work is done as a coursework for the 2nd semester of MAIA in Introduction to Robotics course.The task was to design an Inverse Kinematic controller to move the end-effector from the position pA to the position pB The movement should be repeated 3 times by control: 1)the position-only without exploiting the redundancy 2)the position and the orientation without exploiting the redundancy (desired orientation equal to the initial one) 3)the position and the orientation avoiding an obstacle put in p0 (desired orientation equal to the initial one)
Date
Jun 15, 2018 12:00 AM